基于视觉提示的具身智能空间感知增强方法研究
Research on Spatial Perception Enhancement Method for Embodied Intelligence Based on Visual Prompting
快速导航
1. 数据集说明
主评测数据:paper_release/data/dist_all(160 个样本)。
GraspNet-Desk(0-99)
Real-Desk(100-129)
Sim-Desk(130-159)
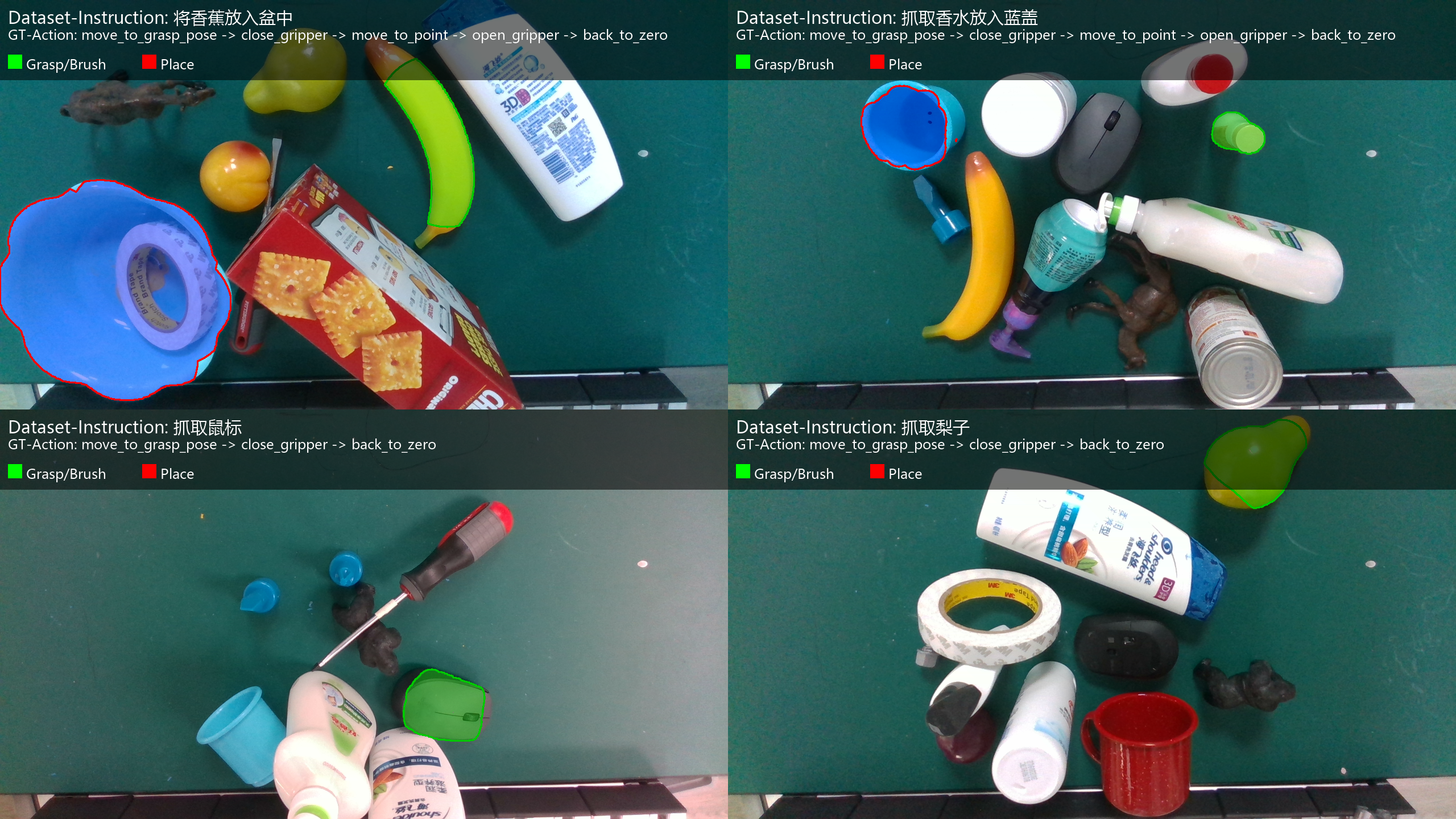
GraspNet-Desk(0-99)样例
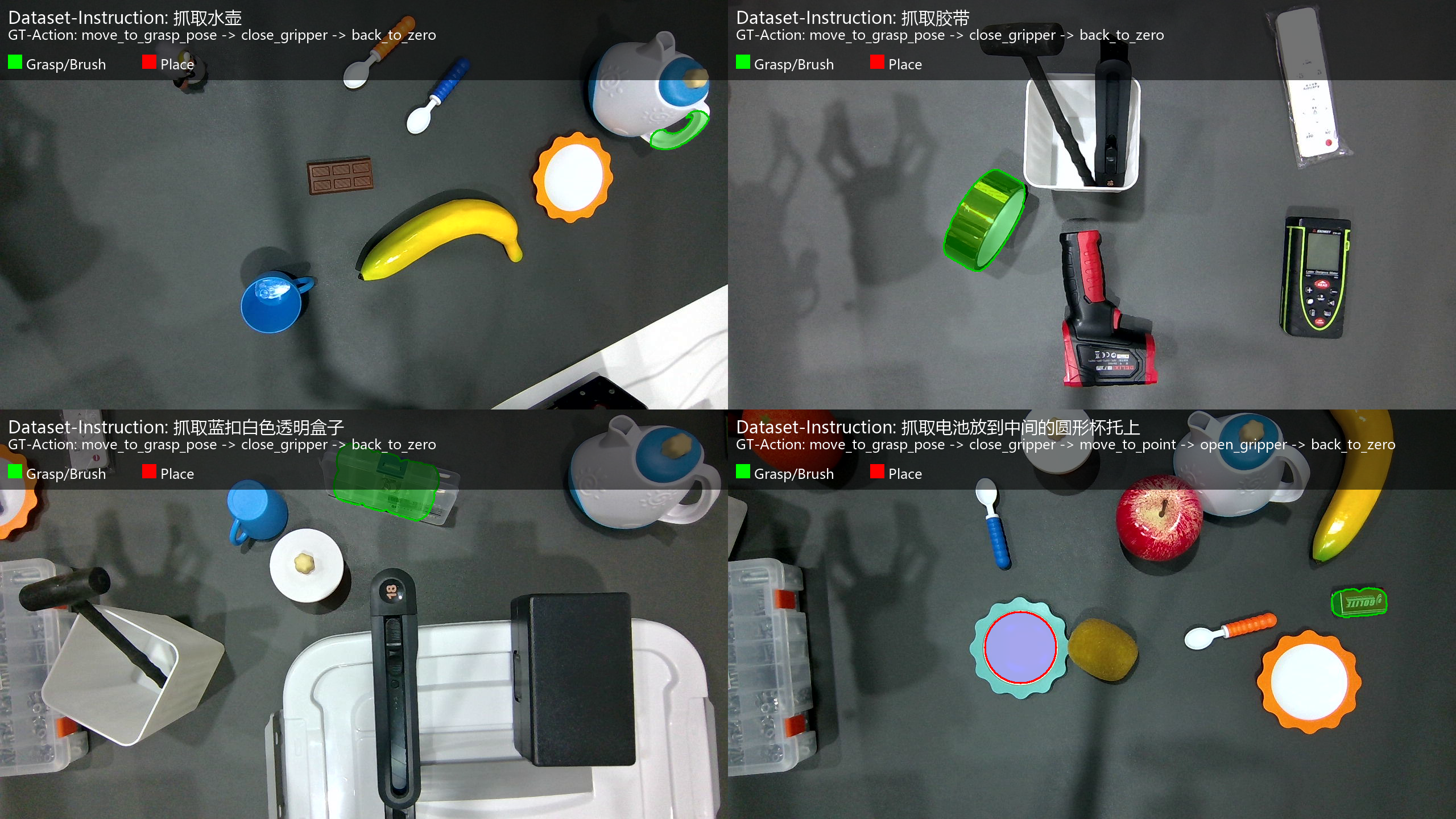
Real-Desk(100-129)样例

Sim-Desk(130-159)样例
2. 方法内容
论文主方法(SVA + SVP + 闭环执行)—— vlm-spatial-grasp
| 文件 | 功能 |
|---|---|
| vision_agent_v2.py | 结构化视觉锚点(SVA)+ 结构化视觉提示(SVP)主链路 |
| main_vlm.py | 端到端执行入口(支持 VLM_METHOD=svp/qwen) |
| grasp_process.py | 抓取候选生成与筛选 |
| manipulator_grasp/ | MuJoCo 机械臂执行环境 |
论文对比方法(基线) —— paper_release/experiments
ours_svp_batch_inference.py
qwen_batch_inference.py
gpt_batch_inference.py
3. 论文实验映射
| 论文表号 | 含义 | 脚本 | 输出 |
|---|---|---|---|
| 表3-2 | 三域数据规模统计 | 按 dist_all 前缀区间统计 | 数据划分口径 |
| 表3-4 | 三域静态评估(命中率/偏差) | paper_release/experiments/table3_3.py | results/tables/table3_3_ai_results*/summary.csv |
| 表4-1 | Full(Oracle-Action)主对比 | paper_release/experiments/table4_1.py | table4_full.csv / table4_full_recomputed.csv |
| 表4-2 | Strict(Supplementary)一致性评估 | paper_release/experiments/table4_2.py | table4_2_strict.csv / table4_2_strict_recomputed.csv |
注意:table3_3.py 是历史脚本名,用于当前论文表3-4对应评估。
4. 结果图(表3-4对应)
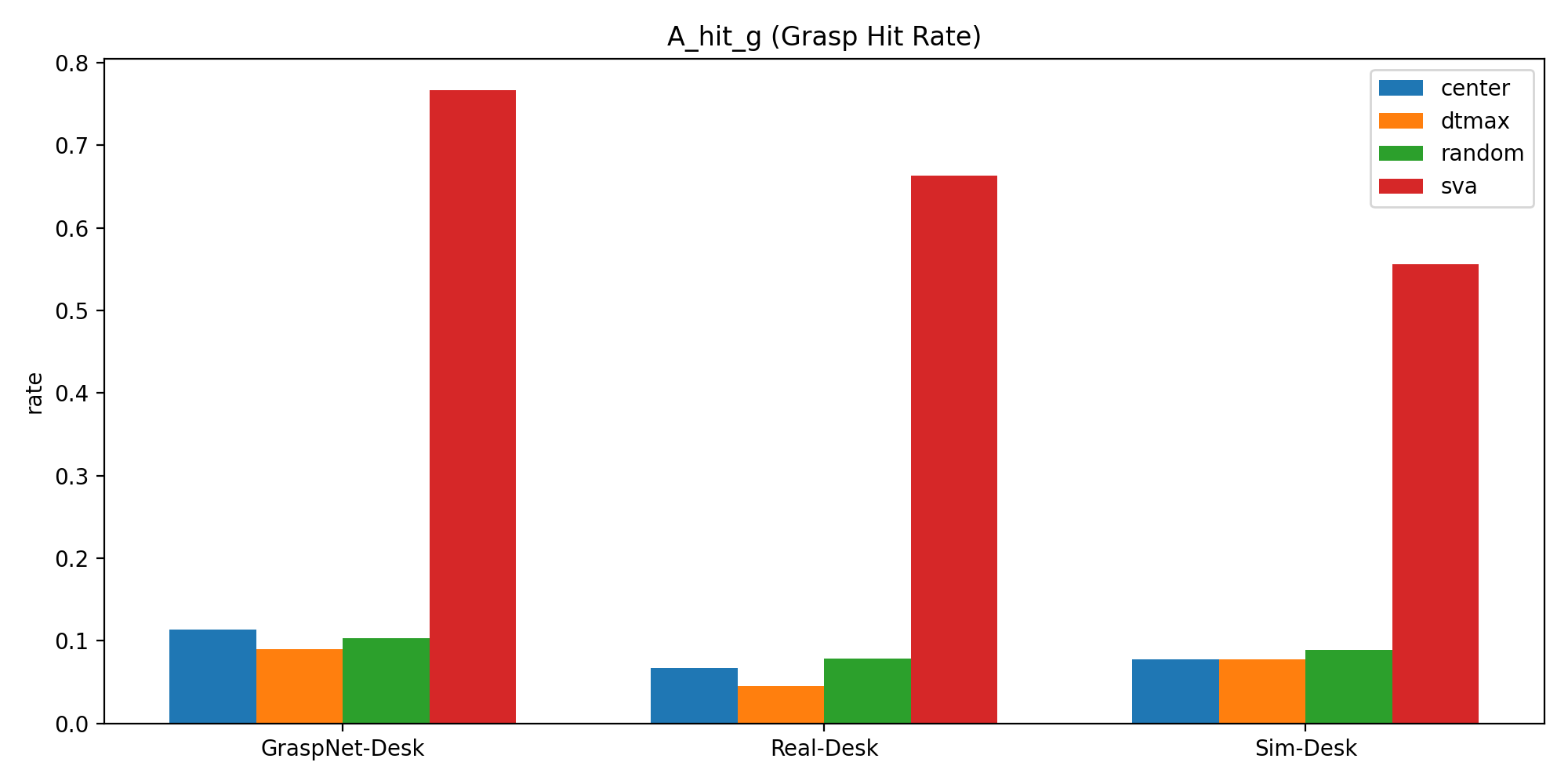
A_hit_g(抓取命中率,越高越好)
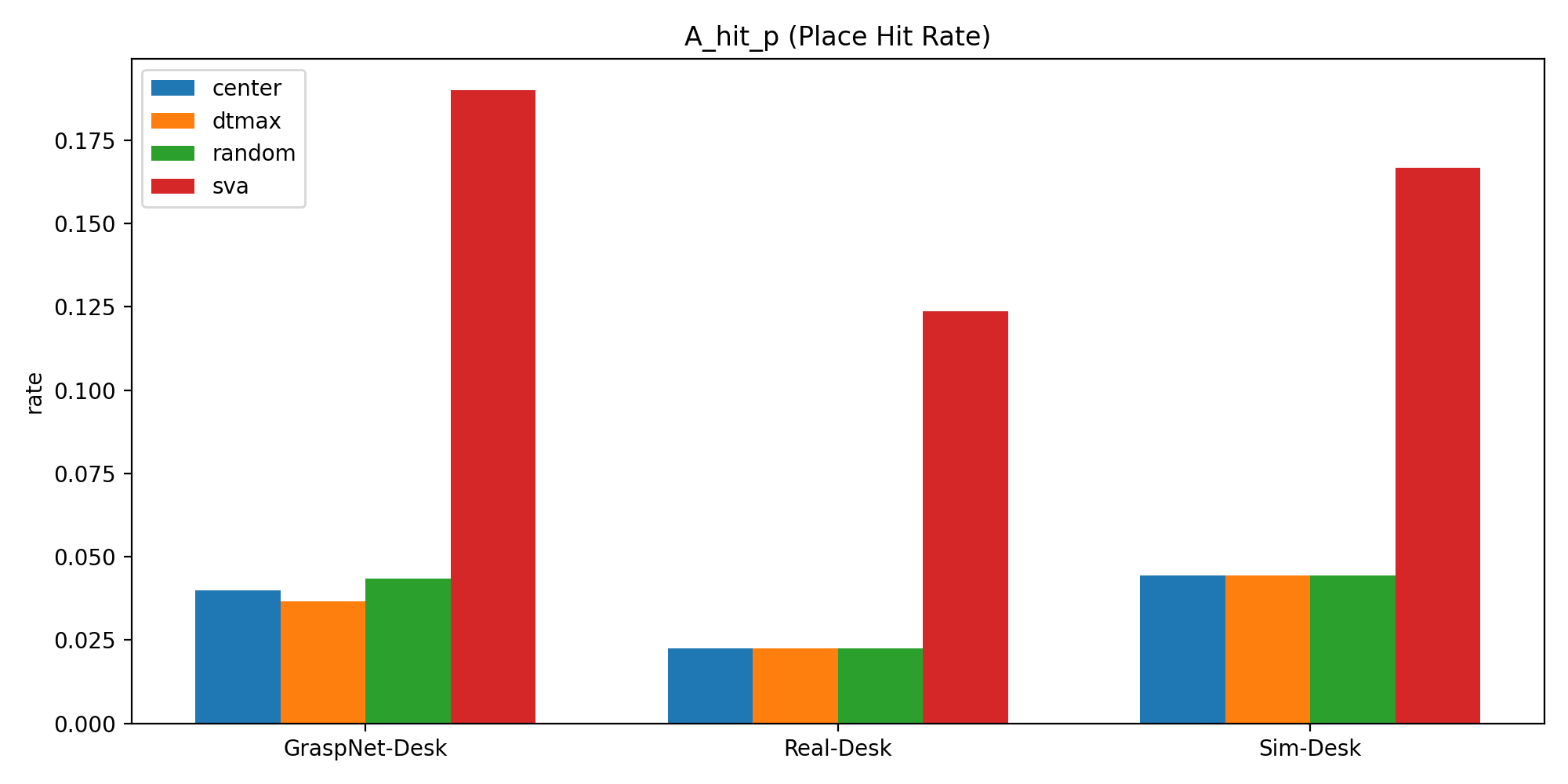
A_hit_p(放置命中率,越高越好)
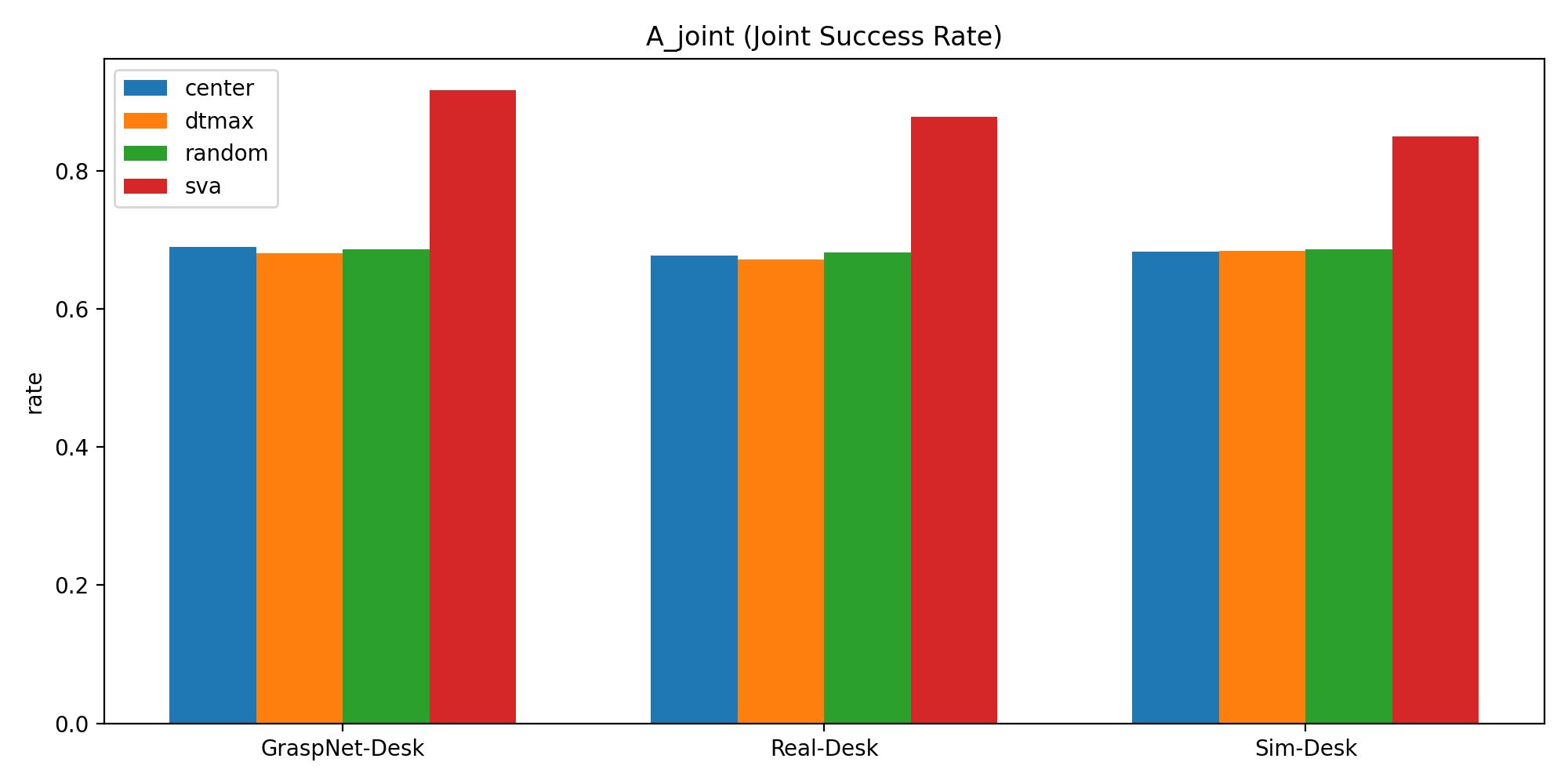
A_joint(联合一致性,越高越好)
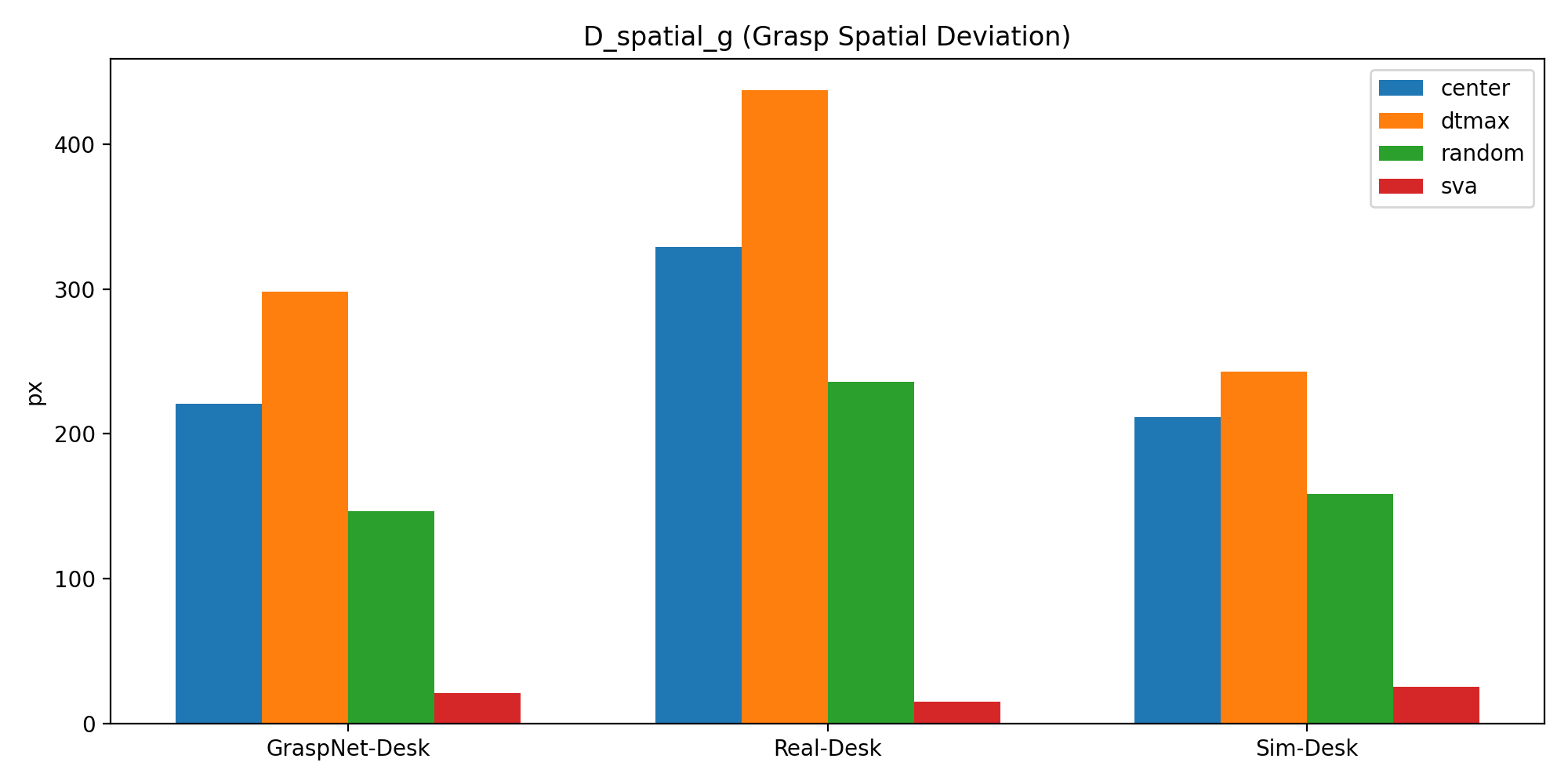
D_spatial_g(抓取偏差 px,越低越好)
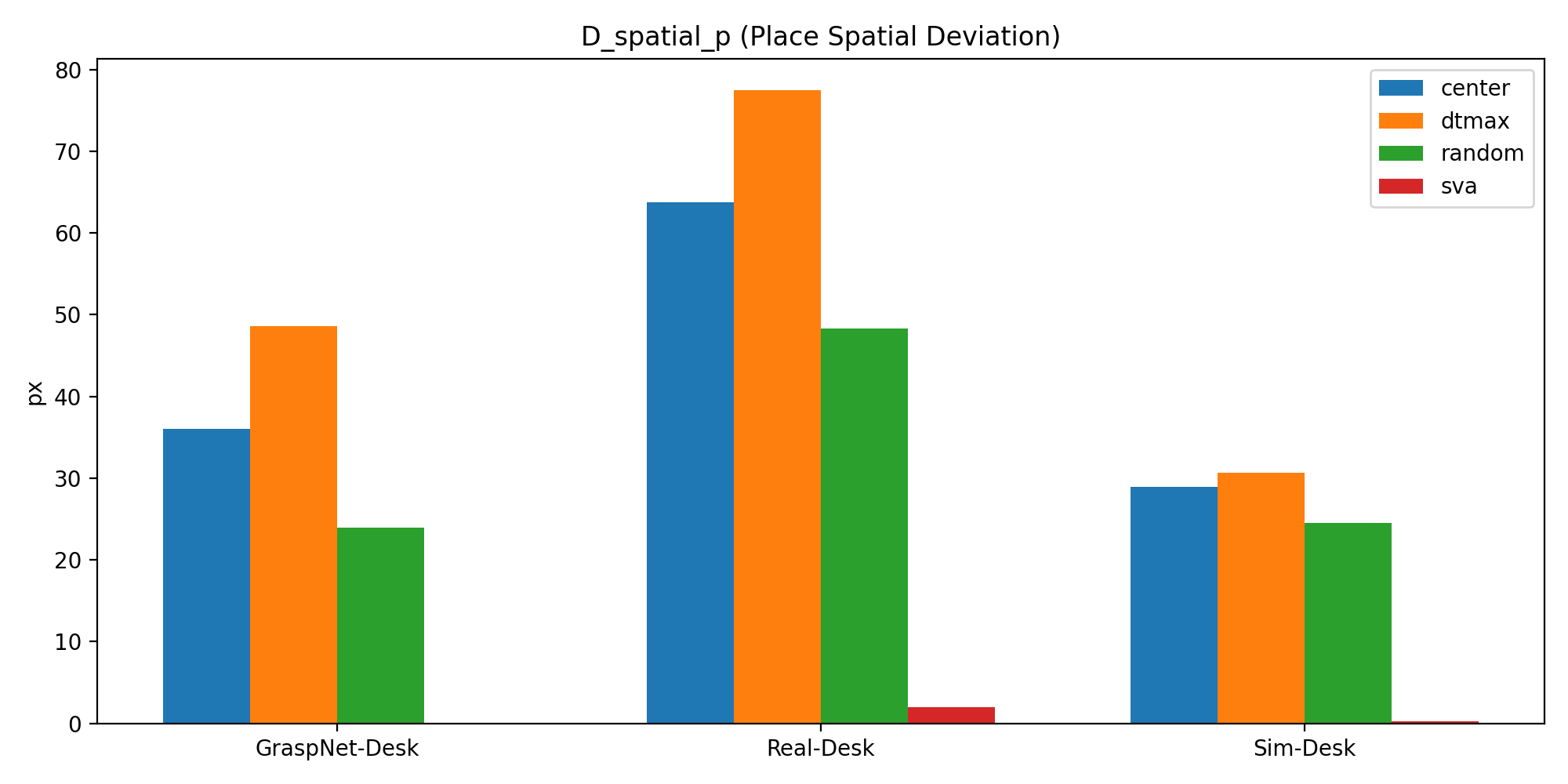
D_spatial_p(放置偏差 px,越低越好)